
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
Tags
- ComputerVision
- vectorcalculus
- usbcamera
- raspberrypi
- 3dmapping
- covariancematrix
- Slam
- sensorfusion
- catkinworkspace
- imageprocessing
- rostopics
- NERF
- opencv
- gaussiansplatting
- differentiablerendering
- turtlebot3
- roslaunch
- rospackages
- electromagnetism
- pointcloud
- vectorfields
- 3dgaussiansplatting
- LIDAR
- realtimerendering
- Ros
- alphablending
- turtlebot
- tilebasedrasterizer
- rosnoetic
- adaptivedensitycontrol
Archives
- Today
- Total
Wiredwisdom
Components 본문
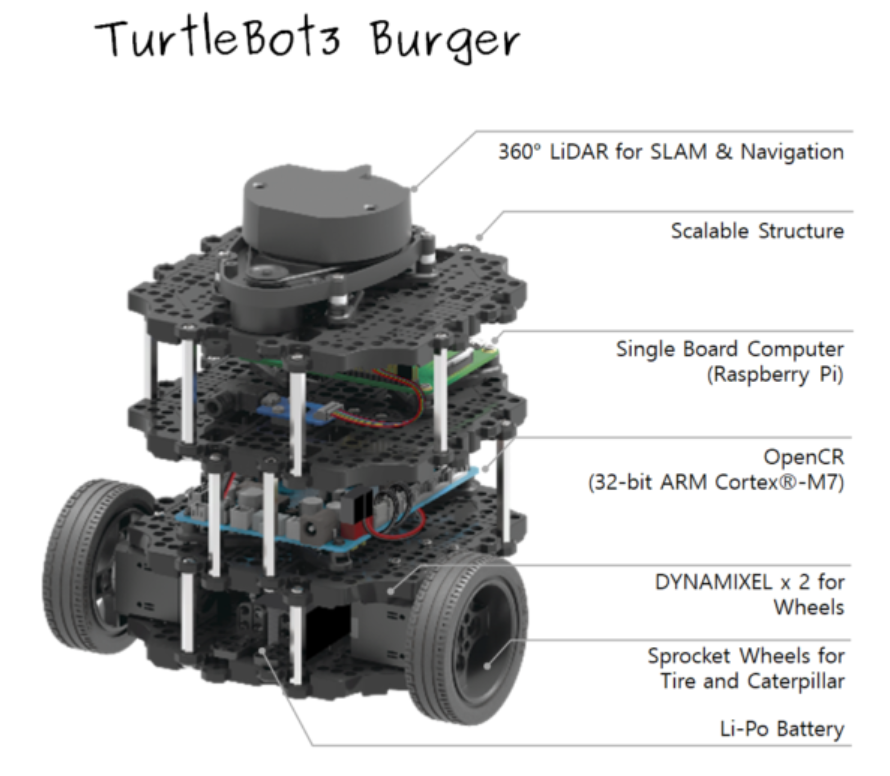



Specification
The Raspberry Pi 3 Model B+ is the final revision in the Raspberry Pi 3 range.
- Broadcom BCM2837B0, Cortex-A53 (ARMv8) 64-bit SoC @ 1.4GHz
- 1GB LPDDR2 SDRAM
- 2.4GHz and 5GHz IEEE 802.11.b/g/n/ac wireless LAN, Bluetooth 4.2, BLE
- Gigabit Ethernet over USB 2.0 (maximum throughput 300 Mbps)
- Extended 40-pin GPIO header
- Full-size HDMI®
- 4 USB 2.0 ports
- CSI camera port for connecting a Raspberry Pi camera
- DSI display port for connecting a Raspberry Pi touchscreen display
- 4-pole stereo output and composite video port
- Micro SD port for loading your operating system and storing data
- 5V/2.5A DC power input
- Power-over-Ethernet (PoE) support (requires separate PoE HAT)


Items Specifications
| Operating supply voltage | 5V DC ±5% |
| Light source | Semiconductor Laser Diode(λ=785nm) |
| LASER safety | IEC60825-1 Class 1 |
| Current consumption | 400mA or less (Rush current 1A) |
| Detection distance | 120mm ~ 3,500mm |
| Interface | 3.3V USART (230,400 bps) 42bytes per 6 degrees, Full Duplex option |
| Ambient Light Resistance | 10,000 lux or less |
| Sampling Rate | 1.8kHz |
| Dimensions | 69.5(W) X 95.5(D) X 39.5(H)mm |
| Mass | Under 125g |
Measurement Performance Specifications
Items Specifications
| Distance Range | 120 ~ 3,500mm |
| Distance Accuracy (120mm ~ 499mm) | ±15mm |
| Distance Accuracy(500mm ~ 3,500mm) | ±5.0% |
| Distance Precision(120mm ~ 499mm) | ±10mm |
| Distance Precision(500mm ~ 3,500mm) | ±3.5% |
| Scan Rate | 300±10 rpm |
| Angular Range | 360° |
| Angular Resolution | 1° |
$ sudo apt-get install ros-kinetic-hls-lfcd-lds-driver$ sudo chmod a+rw /dev/ttyUSB0$ sudo chmod a+rw /dev/ttyUSB0$ roslaunch hls_lfcd_lds_driver view_hlds_laser.launch$ git clone https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver.git$ cd hls_lfcd_lds_driver/applications/lds_driver/
$ make$ ./lds_driver
r[359]=0.438000,r[358]=0.385000,r[357]=0.379000,...$ git clone https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver.git



| Microcontroller | STM32F746ZGT6 / 32-bit ARM Cortex®-M7 with FPU (216MHz, 462DMIPS) Reference Manual, Datasheet |
| Sensors | (Discontinued) Gyroscope 3Axis, Accelerometer 3Axis, Magnetometer 3Axis (MPU9250) (New) 3-axis Gyroscope, 3-Axis Accelerometer, A Digital Motion Processor™ (ICM-20648) |
| Programmer | ARM Cortex 10pin JTAG/SWD connector USB Device Firmware Upgrade (DFU) Serial |
| Digital I/O | 32 pins (L 14, R 18) *Arduino connectivity 5Pin OLLO x 4 GPIO x 18 pins PWM x 6 I2C x 1 SPI x 1 |
| Analog INPUT | ADC Channels (Max 12bit) x 6 |
| Communication Ports | USB x 1 (Micro-B USB connector/USB 2.0/Host/Peripheral/OTG) TTL x 3 (B3B-EH-A / DYNAMIXEL) RS485 x 3 (B4B-EH-A / DYNAMIXEL) UART x 2 (20010WS-04) CAN x 1 (20010WS-04) |
| LEDs and buttons | LD2 (red/green) : USB communication User LED x 4 : LD3 (red), LD4 (green), LD5 (blue) User button x 2 Power LED : LD1 (red, 3.3 V power on) Reset button x 1 (for power reset of board) Power on/off switch x 1 |
| Input Power Sources | 5 V (USB VBUS), 5-24 V (Battery or SMPS) Default battery : LI-PO 11.1V 1,800mAh 19.98Wh Default SMPS : 12V 4.5A External battery Port for RTC (Real Time Clock) (Molex 53047-0210) |
| Input Power Fuse | 125V 10A LittleFuse 0453010 |
| Output Power Sources | *12V max 4.5A(SMW250-02) *5V max 4A(5267-02A), 3.3V@800mA(20010WS-02) |
| Dimensions | 105(W) X 75(D) mm |
| Weight | 60g |
Items Specifications
'Autonomous Driving > Turtlebot3' 카테고리의 다른 글
| Noetic RoS Re-setup (0) | 2024.07.01 |
|---|---|
| OpenCR Setup (1) | 2024.07.01 |
| Master Connecting Procedure - 24 Ver (0) | 2024.07.01 |
| Raspberry pi 3B+ OS setup (0) | 2024.07.01 |
| The Robot Operating System - ROS1 (0) | 2024.07.01 |
'Autonomous Driving/Turtlebot3' Related Articles
more


