
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | 31 |
- roslaunch
- tilebasedrasterizer
- vectorfields
- LIDAR
- rosnoetic
- alphablending
- pointcloud
- rostopics
- catkinworkspace
- opencv
- vectorcalculus
- 3dmapping
- realtimerendering
- adaptivedensitycontrol
- raspberrypi
- turtlebot
- NERF
- sensorfusion
- turtlebot3
- imageprocessing
- Slam
- gaussiansplatting
- usbcamera
- ComputerVision
- 3dgaussiansplatting
- Ros
- electromagnetism
- covariancematrix
- rospackages
- differentiablerendering
- Today
- Total
Wiredwisdom
Turtlebot3 Puppy_Mode 본문

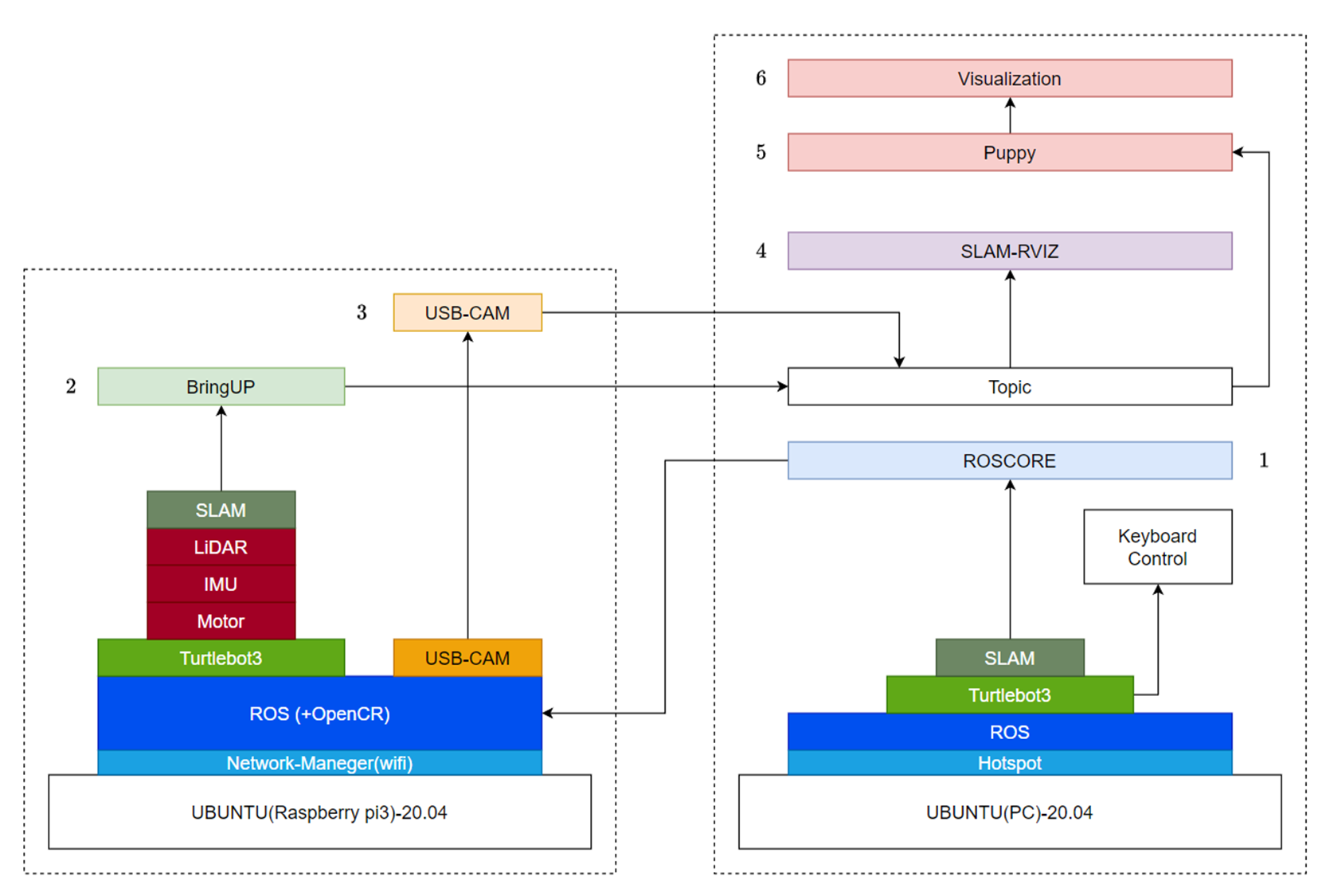


This is a comprehensive autonomous mobile robot system built on the Turtlebot3 platform, integrating multiple sensors for navigation, object detection, and human-robot interaction.
The system centers around a Raspberry Pi 3 as the main processing unit, connected to various sensors including a USB camera for visual input and a LiDAR sensor for spatial mapping and obstacle detection.
The LiDAR provides 360-degree environmental scanning with a 30-degree depth gradation field of view, while the USB camera is positioned 50 pixels above the LiDAR with 15-degree angular coverage on each side for optimal sensor fusion.
The system runs on Ubuntu 20.04 with ROS (Robot Operating System) providing the middleware for distributed computing across multiple nodes, enabling real-time sensor data processing and robot control.
The image processing pipeline incorporates YOLO (You Only Look Once) for real-time object detection and specialized person detection algorithms, with data flowing through synchronized callbacks for temporal alignment.
The system implements SLAM (Simultaneous Localization and Mapping) for autonomous navigation, with distance calculation algorithms enabling precise robot movement control and obstacle avoidance.
The architecture supports multi-layered data processing with RVIZ for 3D visualization, enabling real-time monitoring of robot status, sensor data, and environmental mapping through both local processing and distributed computing nodes.
'Autonomous Driving > Turtlebot3' 카테고리의 다른 글
| Puppy (0) | 2024.08.28 |
|---|---|
| Sensor-Fusion 1차 총 정리 (0) | 2024.08.01 |
| Fusion Final Code analysis (1) | 2024.07.14 |
| FUSION [LiDAR+Camera] (0) | 2024.07.11 |
| FUSION Code review (0) | 2024.07.08 |



