
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 |
Tags
- turtlebot
- pointcloud
- alphablending
- raspberrypi
- 3dgaussiansplatting
- gaussiansplatting
- NERF
- vectorcalculus
- vectorfields
- adaptivedensitycontrol
- rospackages
- Ros
- roslaunch
- electromagnetism
- catkinworkspace
- realtimerendering
- sensorfusion
- imageprocessing
- tilebasedrasterizer
- rostopics
- Slam
- differentiablerendering
- rosnoetic
- ComputerVision
- turtlebot3
- LIDAR
- 3dmapping
- covariancematrix
- opencv
- usbcamera
Archives
- Today
- Total
Wiredwisdom
SLAM Initiate command 본문
PC - roscore
jins@jins-System-Product-Name:~$ roscore
... logging to /home/jins/.ros/log/e12ef2f0-3a0e-11ef-9ee7-153280935340/roslaunch-jins-System-Product-Name-18193.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.0.3:45519/
ros_comm version 1.16.0
SUMMARY
========
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.16.0
NODES
auto-starting new master
process[master]: started with pid [18201]
ROS_MASTER_URI=http://192.168.0.3:11311/
setting /run_id to e12ef2f0-3a0e-11ef-9ee7-153280935340
process[rosout-1]: started with pid [18211]
started core service [/rosout]
Turtlebot3 - bringup
export TURTLEBOT3_MODEL=${TB3_MODEL}
jinyoung@jinyoung:~$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
... logging to /home/jinyoung/.ros/log/e12ef2f0-3a0e-11ef-9ee7-153280935340/roslaunch-jinyoung-1495.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.0.4:33633/
SUMMARY
========
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.16.0
* /turtlebot3_core/baud: 115200
* /turtlebot3_core/port: /dev/ttyACM0
* /turtlebot3_core/tf_prefix:
* /turtlebot3_lds/frame_id: base_scan
* /turtlebot3_lds/port: /dev/ttyUSB0
NODES
/
turtlebot3_core (rosserial_python/serial_node.py)
turtlebot3_diagnostics (turtlebot3_bringup/turtlebot3_diagnostics)
turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://192.168.0.3:11311
process[turtlebot3_core-1]: started with pid [1503]
process[turtlebot3_lds-2]: started with pid [1504]
process[turtlebot3_diagnostics-3]: started with pid [1505]
[INFO] [1720102140.420856]: ROS Serial Python Node
[INFO] [1720102140.466488]: Connecting to /dev/ttyACM0 at 115200 baud
[INFO] [1720102142.586243]: Requesting topics...
[INFO] [1720102142.622510]: Note: publish buffer size is 1024 bytes
[INFO] [1720102142.629018]: Setup publisher on sensor_state [turtlebot3_msgs/SensorState]
[INFO] [1720102142.665382]: Setup publisher on firmware_version [turtlebot3_msgs/VersionInfo]
[INFO] [1720102142.786103]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1720102142.805419]: Setup publisher on cmd_vel_rc100 [geometry_msgs/Twist]
[INFO] [1720102142.849344]: Setup publisher on odom [nav_msgs/Odometry]
[INFO] [1720102142.867644]: Setup publisher on joint_states [sensor_msgs/JointState]
[INFO] [1720102142.888133]: Setup publisher on battery_state [sensor_msgs/BatteryState]
[INFO] [1720102142.910575]: Setup publisher on magnetic_field [sensor_msgs/MagneticField]
[INFO] [1720102142.987301]: Setup publisher on /tf [tf/tfMessage]
[INFO] [1720102143.011835]: Note: subscribe buffer size is 1024 bytes
[INFO] [1720102143.022523]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
[INFO] [1720102143.045763]: Setup subscriber on sound [turtlebot3_msgs/Sound]
[INFO] [1720102143.073410]: Setup subscriber on motor_power [std_msgs/Bool]
[INFO] [1720102143.101778]: Setup subscriber on reset [std_msgs/Empty]
[INFO] [1720102145.748388]: Setup TF on Odometry [odom]
[INFO] [1720102145.757943]: Setup TF on IMU [imu_link]
[INFO] [1720102145.769512]: Setup TF on MagneticField [mag_link]
[INFO] [1720102145.783977]: Setup TF on JointState [base_link]
[INFO] [1720102145.799151]: --------------------------
[INFO] [1720102145.812337]: Connected to OpenCR board!
[INFO] [1720102145.830512]: This core(v1.2.6) is compatible with TB3 Burger
[INFO] [1720102145.857793]: --------------------------
[INFO] [1720102145.866553]: Start Calibration of Gyro
[INFO] [1720102148.307673]: Calibration End
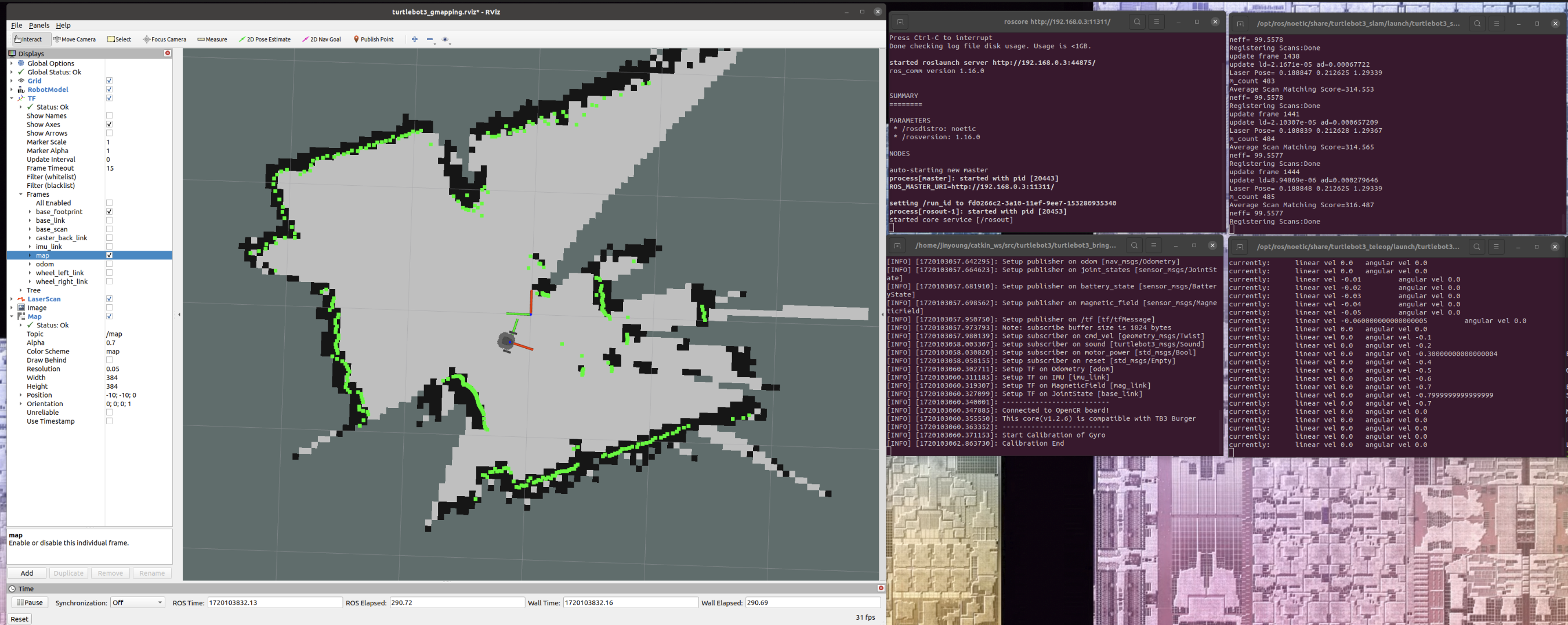
PC - SLAM
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_slam turtlebot3_slam.launchPC - Keyboard
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
'Autonomous Driving > Turtlebot3' 카테고리의 다른 글
| [depth_image_proc] package (0) | 2024.07.08 |
|---|---|
| USB 카메라 이미지를 Raspberry Pi에서 PC로 스트리밍 및 RViz에 표시하는 방법 (1) | 2024.07.08 |
| Ros Structure (0) | 2024.07.03 |
| Sensor Fusion (0) | 2024.07.03 |
| First Procedure [Setup~Keyboard] (0) | 2024.07.03 |
'Autonomous Driving/Turtlebot3' Related Articles
more



